MBD
MBDとは
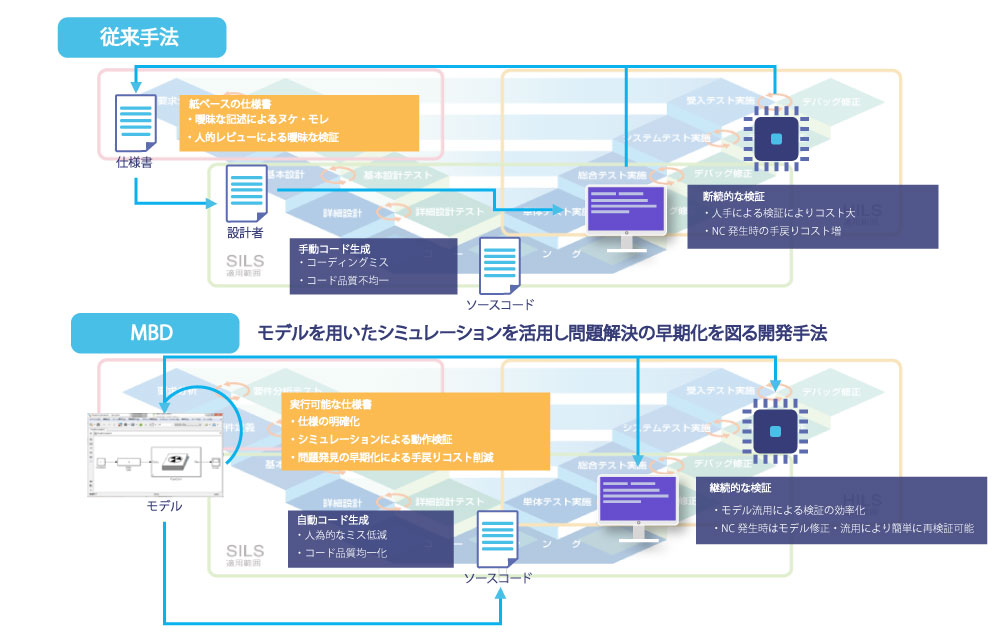
MBD(Model Base Development:モデルベース開発)とは、上流工程となる仕様策定段階から仕様をモデルとして作成しシミュレーション実行することで、仕様不備や手作業でのミス等の問題を早期解決し短期間で高品質な開発を行うための手法です。また、仕様策定段階で作成したモデルを、コーディング時はモデルからの自動コード生成、テスト時はモデルからのテストデータ生成等、下流工程でも活用する事を想定している為、モデルベース開発と呼ばれています。
MILS
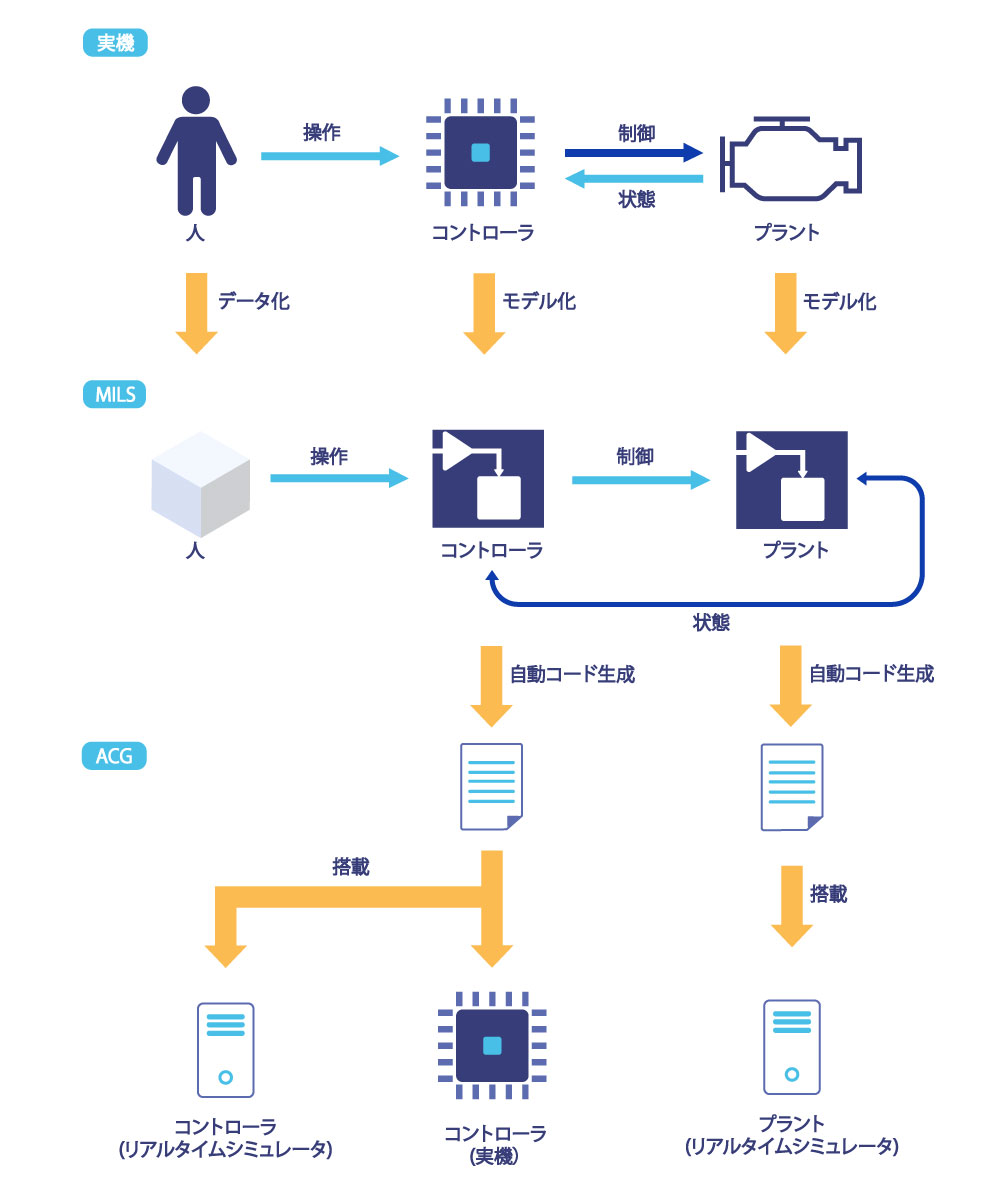
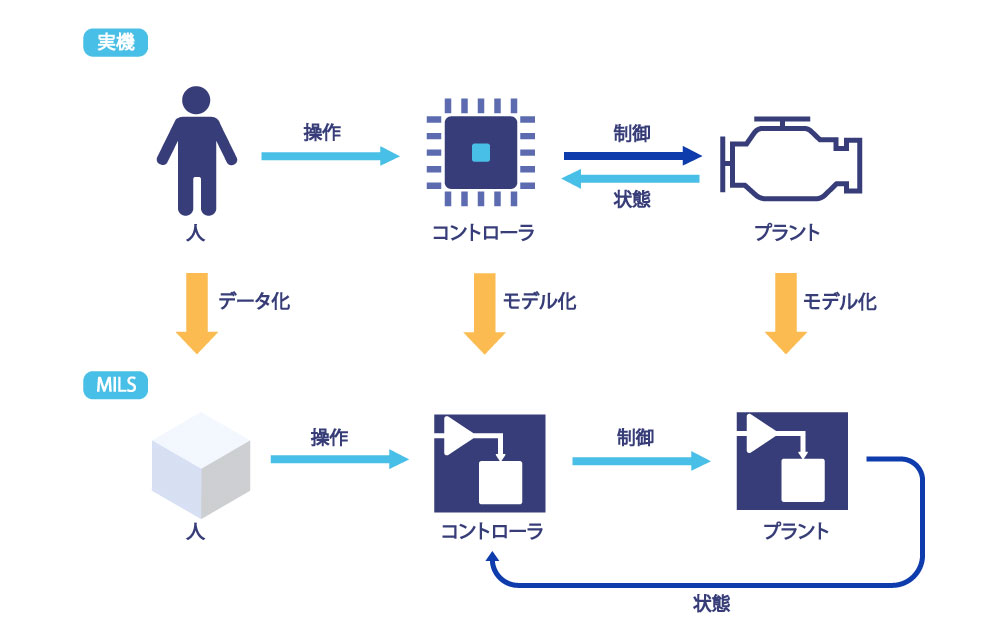
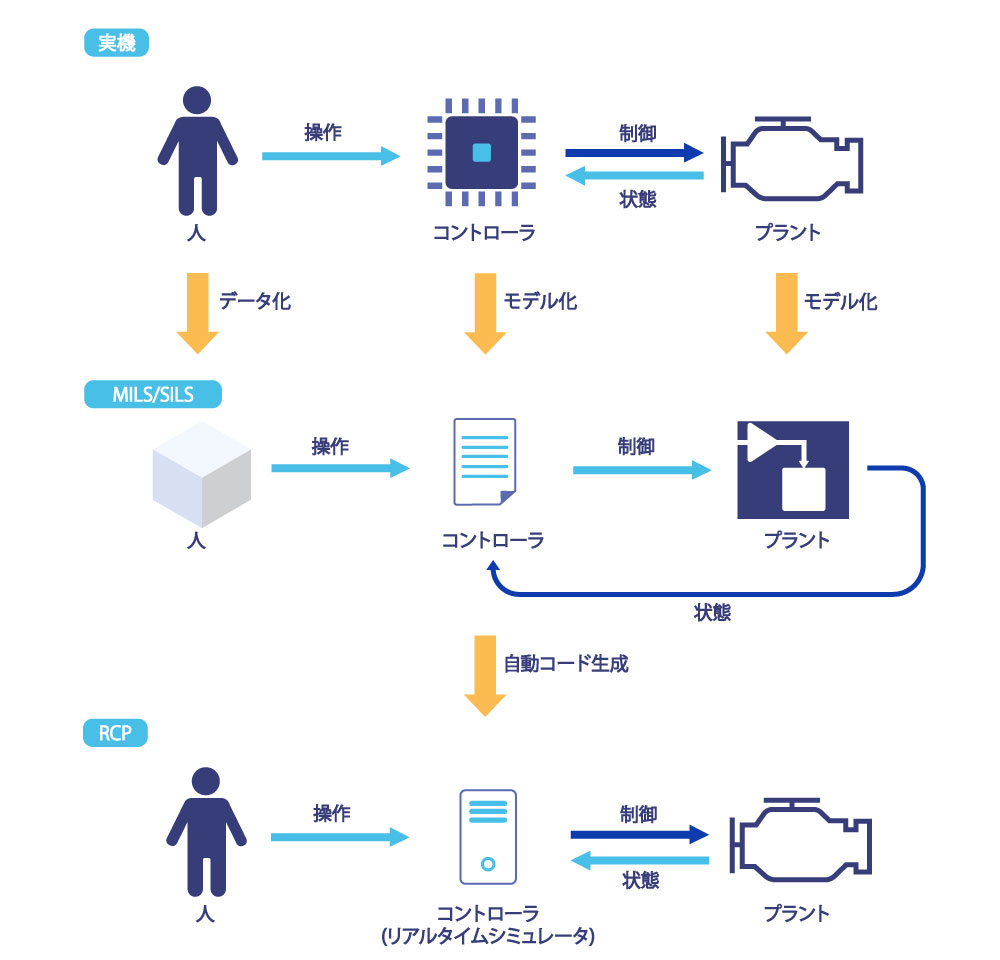
MILS (Model In the Loop Simulation) とは、Simulink等で制御対象 (プラント) と制御機器 (コントローラー) を共にモデルとして作成し、プラントとコントローラー間のフィードバック制御をシミュレーションすることで動作検証を行う開発手法です。これにより、実機が無くても制御の開発・検証を行うことが可能になります。
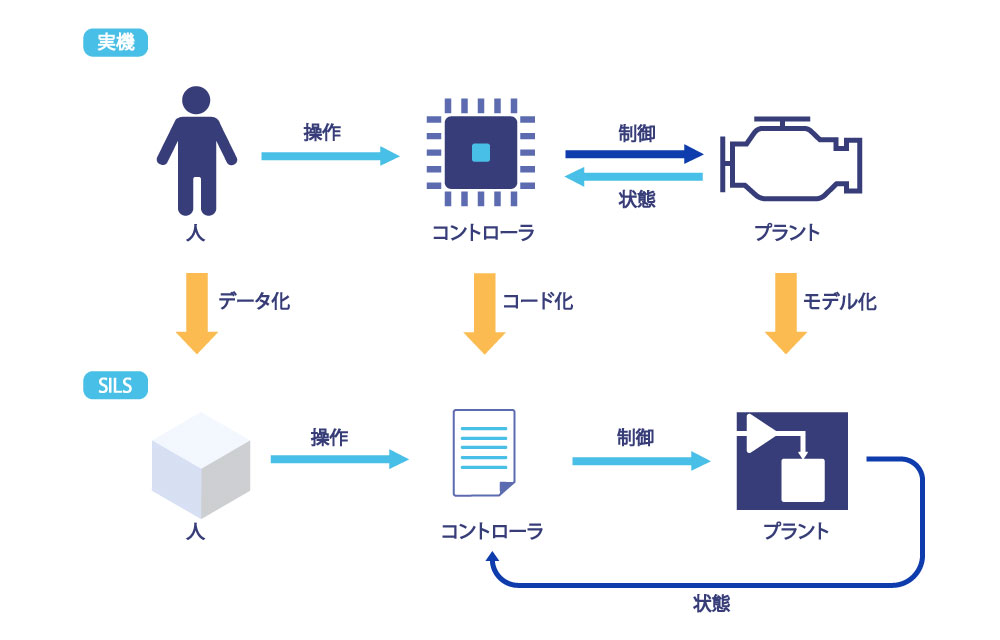
SILS
SILS (Software In the Loop Simulation) とは、Simulink 上で制御機器 (コントローラー) をC言語等のコード(ソフトウェア)で、制御対象 (プラント) をモデルで作成しプラントとコントローラー間のフィードバック制御をシミュレーションすることで動作検証を行う開発手法です。これにより最終的なソフトウェアに近い形での制御アルゴリズムの開発・検証を行うことが可能になります。また、既存のソフトウェアを流用しやすいメリットもあります。
RCP
RCP (Rapid Control Prototyping) とは、Simulinkモデルで構築された制御機器 (コントローラー) のアルゴリズムをC言語等のコード(ソフトウェア)に自動生成し、生成されたコードをリアルタイムシミュレータに搭載することで実機の制御対象(プラント)を用いた動作検証を行う開発手法です。これにより、制御機器の完成前にリアルタイム環境での検証が可能となり、シミュレーションでは発見しにくいタイミング依存や割込/例外などによる問題の早期発見が可能になります。
HILS
HILS (Hardware in the loop simulation) とは、Simulinkモデルで構築された制御対象 (プラント) をC言語等のコードに自動生成し、生成されたコードを
リアルタイムシミュレータに搭載することで実機の制御機器(コントローラ)の動作検証を行う開発手法です。これにより、制御対象の完成前に実機による検証が可能となり、開発期間の短縮や問題の早期発見が可能になります。

ACG
ACG (Auto Code Generation) とは、Simulinkモデルで構築された制御対象 (プラント) や制御機器(コントラ-)をC言語等のコードに自動生成する技術です。コードを自動生成するため、人手によるコーディングで発生しがちな記述ミスや作成者のスキルレベル差によるバラツキ等による問題発生を抑止します。